吨包搬运机械手
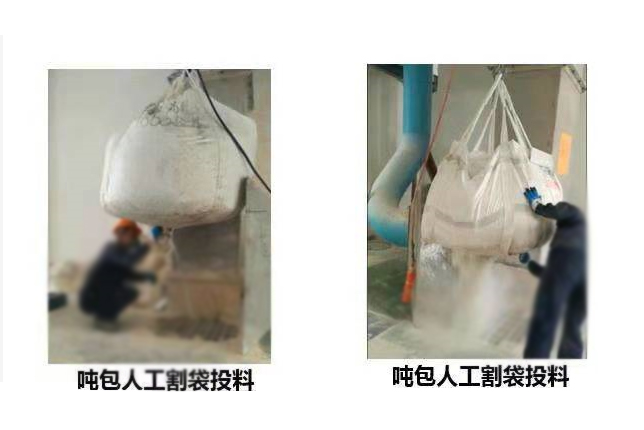
项目需求:首先将吨包从输送带抓起到开袋机构上,把吨包底部打开,然后再抓起抖动几下,物料流完后空袋子再抓出去。
项目要求:
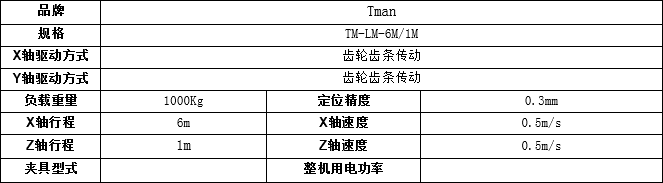
1、设备总高度要低,4米内实现抓包。
2、一个机械手实现功能。吨包就是常规结构,物料有类似面粉的粉体和泥土状物。
方案设计
吨包系统主要由:
1) 桁架机械手
2)多功能夹手
3)称重系统
4)3维 扫描系统组成
5)开包划刀

设备主要结构
1、设备结构组成
(1)立柱
(2)X行走纵梁
(3)Z轴升降轴




2、设备主要参数
称重系统
在多功能夹手末端装有S型称重传感 器,主要功能:
1) 抓包时,检测是否抓错了包
2 )放料时,检测料是否放干净

3D 扫描
夹手中间架配1套3D扫描仪相机,在桁架抓取前,先扫描被抓取目 标物的外形轮括,同时确定目标物的X 、Z 坐标。


多功能夹手
夹手采用Q235B 钢材焊接成形,通过伺服电机和丝杠调节,可适应 80mm~2500mm 直径产品。



多功能夹手 –抖包
抖包主要通过:
振动气缸
上下导向柱
末端弹簧
三部分 来实现物料上下抖动,达到物料下落目的

多功能夹手 –开口
在下料位,设有定定利刃,桁架机械手,抓着料包划过, 将料包开口


